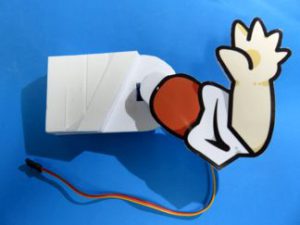
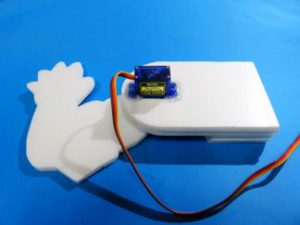
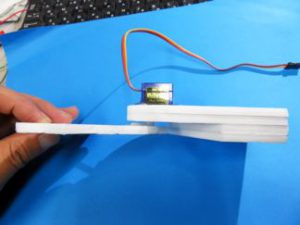
左腕はサーボモータ(SG-90)で動くようにします。
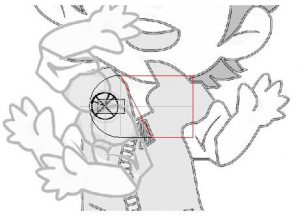
まずは左腕の回転軸をどこにするか決めます。
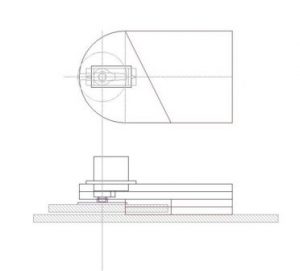
次に左腕の稼働範囲を決めます。
それが終わってからサーボモータを固定するための取付部を設計しました。
パネルの余った部分を使って製作しました。
メールアドレスが公開されることはありません。 * が付いている欄は必須項目です
コメント
名前 *
メール *
サイト
email confirm*
post date*
日本語が含まれない投稿は無視されますのでご注意ください。(スパム対策)
住所〒592-8333大阪府堺市西区浜寺石津町西4-19-5 パソコンレスキュー2F
営業時間月〜金: 10:00 AM – 7:00 PM